C23C17
Development of Real-time Cyberattack Prediction & Warning System
Investigator(s):
Zhixia (Richard) Li, University of Cincinnati, ORCID # 0000-0002-7942-4660 (PI)
Project Description:
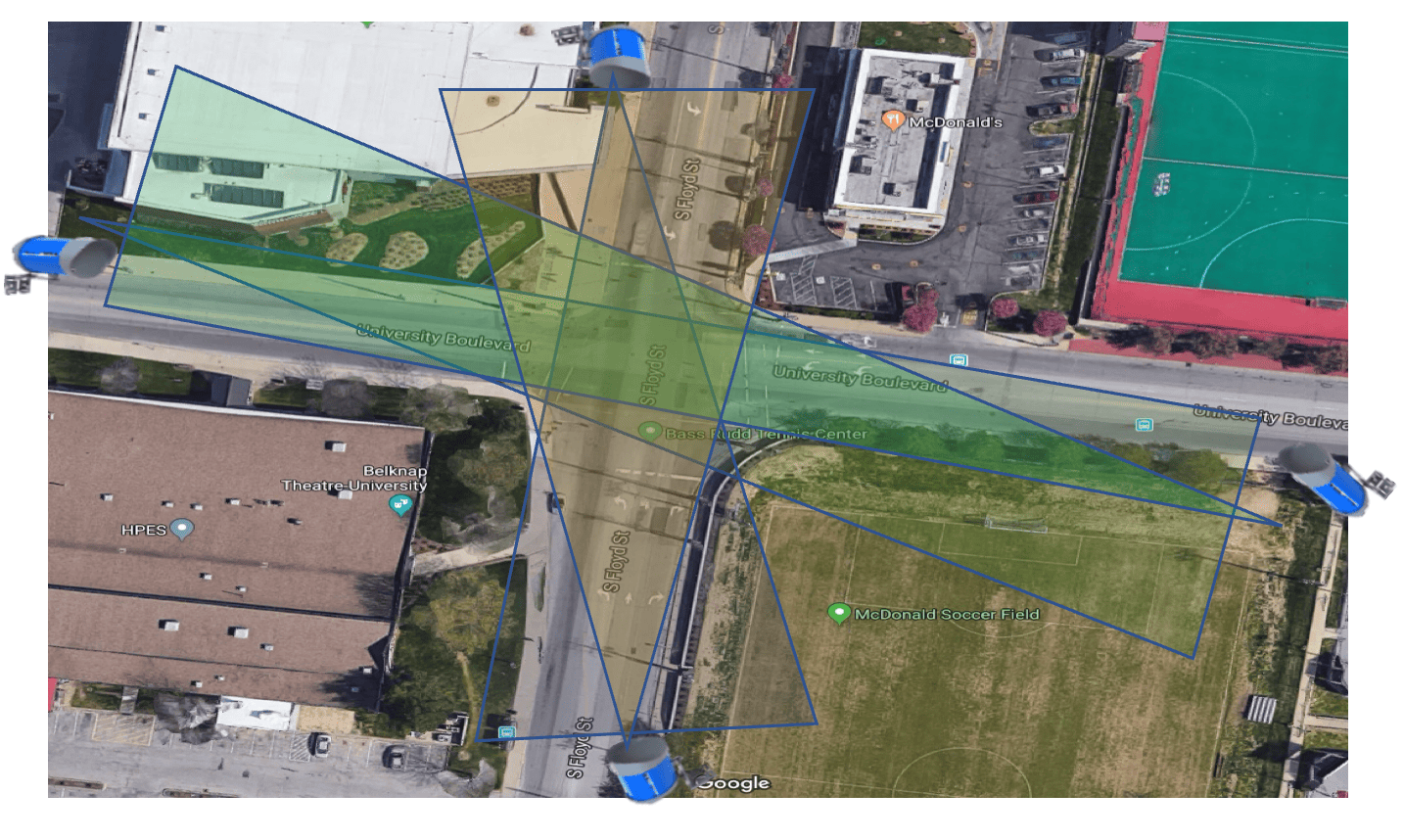
Figure 1 Radar sensor depoloyment in the cyberattack warning system
When a cyberattack occurs, the most significant information we need to know is whether the vehicle is attacked or not. In fact, the vehicle's speed is the most crucial piece of information for those protecting against cyberattacks because it determines whether driver has been successfully attacked or not. Therefore, if we could develop a behavior prediction model for vehicles under cyberattack, it could be aware of the event and notify subsequent vehicles or halt all directions at the intersection to prevent further catastrophe. Many researchers have yet to consider kinetic parameters within advanced learning strategies for a more accurate depiction of trajectories. Furthermore, even with identical speeds at the same moment, vehicles might exhibit significantly different accelerations, which indicate varying states for predicting future vehicle trajectories. Compared to the prediction methods (Markov chain, recurrent neural network), Generative adversarial networks (GANs) are capable of capturing and replicating complex data distributions. This makes them well-suited for modeling complex, non-linear trajectories of vehicles, which may not be effectively captured by Markov chains. In addition, vehicle trajectory prediction often involves multiple variables, such as position, speed, acceleration, etc. GANs can process this high-dimensional data and capture the interactions between these variables effectively than other methods. Therefore, we propose a theoretical framework for predicting trajectories under cyberattacks at connected signalized intersections.
The objective is three-fold:
- Develop a deep learning-driven method to predict vehicle trajectories influenced by cyberattacks at a connected signalized intersection
- Use pre-collected driving simulator experiment data to train and validate the prediction model and warning system
- Develop a warning system based on the prediction result, which can warn drivers of the potential cyberattack before they realize the attack