C23C14
Exploring Safety and Security Accident-Management Policies for CAVs
Investigator(s):
- Carlos Rubio-Medrano, Texas A&M University – Corpus Christi, ORCID # 0000-0001-8931-6412
(PI)
Project Description:
The adoption of self-driving Connected and Automated Vehicles (CAV) in combination with Advanced Vehicle Technology (AVT) has improved road traffic safety and decreased the occurrence of accidents. However, collisions have not been completely eliminated, as they can be attributed to the unpredictable conduct displayed by other road participants, and to the absence of a decentralized administrative and enforcement framework for Accident-Management (AM-) Policies. As an example, previous works include prioritizing the safety and security of the passengers over any other bystanders and infrastructure that may be involved in the incident. Moreover, such an approach may not suit certain passengers or situations. For instance, AM-Policies like: “save bystanders if children, save me otherwise” may not be considered. Also, some AM-Policies may not be even enforceable in practice, e.g., there may be not enough sensor data, and/or processing time to achieve the desired result, e.g., saving the passengers. In order to overcome these shortcomings, this project proposes the development of a distributed, multi-user, multi-vehicle framework for the specification, evaluation, and enforcement of AM-Policies in the context of CAVs. This framework will consist of: first. we will resort to a user study to explore the viewpoints of passengers and bystanders and define potential AM-Policies based on varying case scenarios including CAV configurations, incidents, accidents, etc. Also, we will design and implement a theoretical model for AM-Policies for policy specification, analysis, and conflict resolution. Second, we will leverage blockchain technology to establish a decentralized framework for policy management, utilizing smart contracts to efficiently implement autonomous and binding agreements.
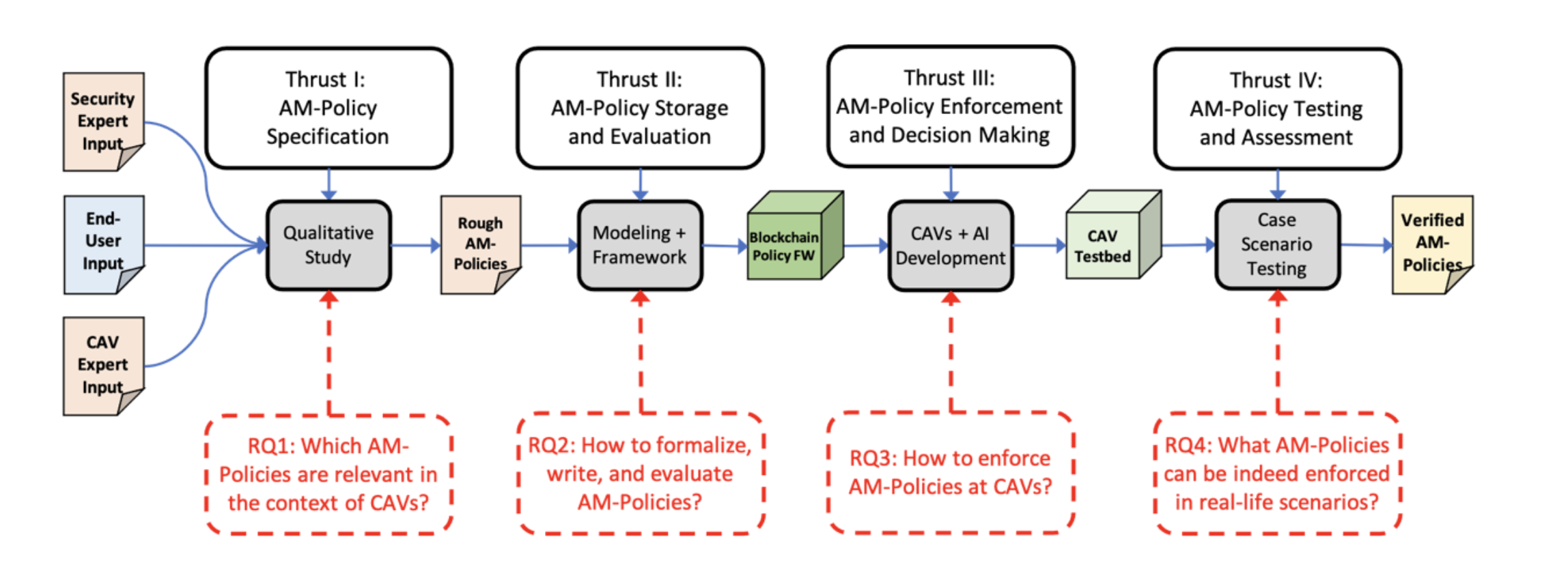
Figure 1. The Research Thrusts, Methods, and Products Devised for this Project.
Third, we will develop a multi-modal deep model for informative and accurate decision-making, such that different types of sensor signals and visual inputs, which are needed for successfully evaluating and enforcing AM-Policies, can be effectively incorporated. Finally, we will perform an empirical evaluation leveraging a series of case scenarios with varying configurations, accidents, situational information, etc