
Last year was a tumultuous one for our industry, our country and our world. As 2021 dawns, we continue to grapple with the effects of the coronavirus pandemic, adjust to the new normal, and look ahead to a hastening energy transition and digital transformation of the energy industry as we know it. At Subsea Systems Institute (SSI), we will keep our eyes on our mission to improve safety and efficiency of offshore energy development by facilitating engineering, science and policy research, and through third party unbiased validation of technology and practices.
Throughout last year and going forward, research progresses rapidly and we are pleased to share our latest updates and upcoming Center-of-Excellence projects with you below. The projects seeded by SSI funding have blossomed and garnered federal grants, national academy support and industry sponsored research funding. The power electronics consortium developed at the University of Houston continues to build on cutting edge research.
We are also extremely proud to announce that SSI has been awarded a grant to focus on workforce and economic development as it relates to offshore energy production. Steps are underway to fully define the scope of work, strategies for execution and outcomes. Finally, we encourage you to get to know SSI better and become more involved in the work we’re doing.
Houston and the state of Texas can continue its leading role as a global energy center by managing the hydrocarbon and renewable energy resources in the Gulf to meet the increasing demand for energy that is affordable, reliable, and sustainable. We are eager to engage with you this year to move forward together.
Stay safe and be well,
Ramanan
In 2016, the Subsea Systems Institute (SSI), a Center of Excellence formed under the Restore Act, and a collaboration between the University of Houston, Rice University and NASA/Johnson Space Center, began funding applied research focused on translational engineering and technology development for offshore and deepwater energy exploration and production.
Guided by our Industry Advisory Board, projects focused on three areas in our first contract: 1) emergencies and hazard mitigation 2) communications and 3) robotics for offshore applications.
Eleven projects were funded over the past four years. Updates on our most recently concluded projects are presented below.
Please visit our website for information on all of SSI’s previously funded projects: SUBSEASYSTEMS.INSTITUTE
Flexible Low-Temperature Lithium Ion Batteries for Subsea Applications
Haleh Ardebili UH | Rafael Verduzco RICE
There has been an increasing demand in the oil and gas industry for innovative solutions to inspect, maintain and repair (IMR) subsea installations since Deepwater Horizon oil spill disaster in 2010. This environmental catastrophe could have been avoided with appropriate inspection and maintenance operations. In this context, it is necessary to develop an energy storage device that can deliver power safely under high-pressure and low temperature subsea conditions. The main goal of this project was to design and fabricate polymer-based flexible and safe lithium ion batteries able to operate under subsea conditions.
The project was a collaboration between the Haleh Ardebili group at the University of Houston, the Rafael Verduzco group at Rice University, and William Walker at NASA. The specific goals of this project were to (a) design and fabricate batteries that provide steady and long-term power and voltage at low temperature (UH); (b) boost the performance of the battery through enhancing the battery materials properties through novel material designs and high resolution and rigorous characterization techniques (UH and Rice) (c) develop thermo-electrochemical model and conduct the simulation at low temperature to validate the experimental results (UH and NASA).
Prototypes were assembled and tested using the novel polymer electrolytes, and a thermo-electrochemical model was developed. The insights from this study will enable a more effective design and fabrication of solid-state lithium-ion batteries for safe and subsea operations.
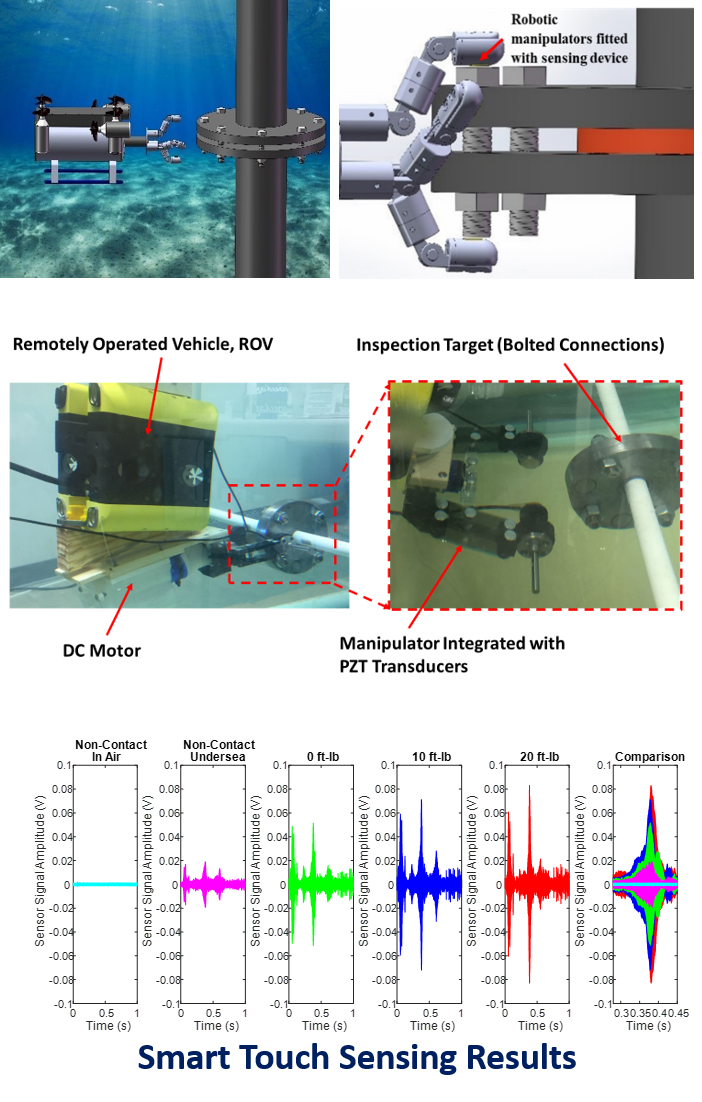
SmartTouch: Towards Autonomous Subsea Robotics for Underwater Pipeline Inspection
Zheng Chen UH | Gangbing Song UH
One of the fundamental building blocks of the subsea oil and gas industry are the thousands of miles of pipelines installed across the seabed, such as in the Gulf of Mexico. The pipelines serve to carry valuable fluids from subterranean reservoirs to the topside, and thus must be able to withstand years of high pressure, high temperature conditions. While subsea pipelines may be engineered to withstand such harsh conditions, unexpected events can prematurely cause failure of pipeline structures, including bolted flanges, welding, etc.
Such events are ideally mitigated by timely maintenance and inspection of subsea pipeline structures. However, such routine actions can be excessively costly and when divers are involved, the issue of safety becomes a major consideration. Furthermore, depending on the skill and experience of human operators, certain critically damaged components may be missed. Failures that occur from damages that were overlooked by inspection routines can have catastrophic consequences, leading to hundreds of fatalities and billions of dollars of damage over the past two decades.
The goal of this project was to develop transformative robotic and SmartTouch sensing technology, that leads to a time efficient and cost-effective system for underwater pipeline inspection.
To achieve the research objective, the following tasks were investigated:
- Develop SmartTouch sensing for pipeline structure inspection
- Design dexterous robotic manipulator for remotely operated vehicles (ROVs) to deliver SmartTouch sensors to complex pipeline structures
- Develop force feedback sensing and grasping control for manipulator
- After integration of key components, conduct comprehensive testing
The tool integrates state-of-the-art robotic manipulator controls for ROV and the latest structural health monitoring and inspection methods to automate pipeline inspection, including loosened connectors and deformed pipelines inspection. With the developed technology, pipeline inspections of structures will be safer, more economical, and more accurate.
Publications Resulting from This Work:
[1] J. Jiang, S. C. Ho, T. Tippitt, Z. Chen, and G. Song, "Feasibility Study of a Touch-enabled Active Sensing Approach to Inspecting Subsea Bolted Connections Using Piezoceramic Transducers", Smart Materials and Structures, Vol. 29, No. 8, p.085038, 2020.
[2] W. Zuo, G. Song, and Z. Chen, "Active Disturbance Rejection Control for Grasping Force Tracking ", Proc. of 2020 American Control Conference, pp. 2611-2616, Denver, CO, July 2-3, 2020.
[3] Furui Wang, Zheng Chen, Gangbing Song, “Smart Crawfish: A Concept of Underwater Multi-bolt Looseness Identification Using Entropy-enhanced Active Sensing and Ensemble Learning”, Mechanical Systems and Signal Processing, Vol 149, No 15, p. 107186, 2020.
SmartTouch: Towards Autonomous Subsea Robotics for Underwater Pipeline Inspection
Zheng Chen | Gangbing Song
One of the fundamental building blocks of the subsea oil and gas industry are the thousands of miles of pipelines installed across the seabed, such as in the Gulf of Mexico. The goal of this project was to develop transformative robotic and SmartTouch sensing technology, that leads to a time efficient and cost-effective system for underwater pipeline inspection.
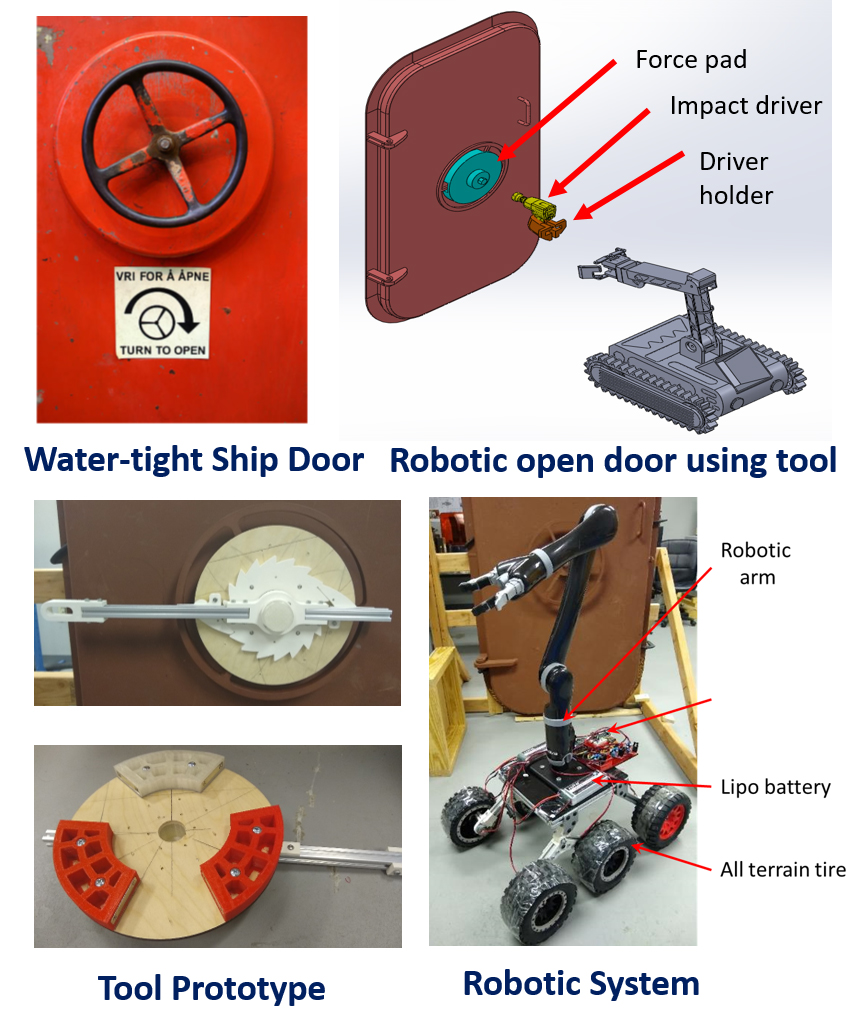
Remote Robotics for Unmanned Human Environments: Interfacing Robots and Oil Rig Platform Doors
Zheng Chen UH | John Allen
Normally-unmanned installations (NUIs) are becoming more prevalent throughout the oil and gas industry. These installations seek to decrease risk and cost to oil and gas companies by removing humans from routine yet dangerous operational environments. Robotic assets deployed on these platforms could mitigate risk and cost by managing tasks that require physical interaction, thereby reducing the need for direct human intervention. Dexterous robots that can operate in human-engineered environments would allow for the conversion of these existing platforms, greatly expanding the benefit of NUI operations across the industry.
The goal of this proposed project is to increase the ability of robotic assets to manage the physical operations and tasks necessary for both oil platform and spacecraft habitat maintenance. In support of this goal, the specific technical objective of the project is to advance the autonomous skills of dexterous robots capable of performing these remote tasks. This will assist remote human operators by reducing their cognitive workload during operations, and promises to increase task efficiency and improve safety at remote sites in the future.
This project will address the following specific research actions:
- Opening door tool design and pickup
- Design door opening robot and open the door
- Transition through the door
- Comprehensive testing: Fabricating the door fixture and testing
Remote Robotics for Unmanned Human Environments: Interfacing Robots and Oil Rig Platform Doors
Zheng Chen | John Allen
Normally-unmanned installations (NUIs) are becoming more prevalent throughout the oil and gas industry. These installations seek to decrease risk and cost to oil and gas companies by removing humans from routine yet dangerous operational environments. Robotic assets deployed on these platforms could mitigate risk and cost by managing tasks that require physical interaction, thereby reducing the need for direct human intervention.
Remote Robotics for Unmanned Human Environments: Collision Avoidance in Subsea
Aaron Becker UH
ROVs are high-value assets sent to areas difficult to access. Consequently, they are used in the oil and gas industry for tasks which can be dangerous for human personnel, such as rig inspection. Collision avoidance is a paramount concern to protect both subsea assets and the robots themselves. This is necessary, because servicing an ROV stranded subsea would require rescue missions that scale in complexity. In addition, AUV swarms require low-cost, robust methods to avoid agent-agent collisions.
The Robotic Swarm Control Lab and collaborators have designed and tested tri-axial antennas for underwater AUVs and ROVs. Pairs of these antennas can be implemented to rapidly measure relative 6-DOF range and orientation between pairs of AUVs and/or AUVs and underwater assets.
This study tested procedures for collision avoidance using triaxial magnetic induction and computer vision. Tasks included:
- Design of TX/RX Control Circuits for Triaxial Antennas
- Generation of 3D Models for Transmission Power Between Antenna Pairs
- Validation of models through underwater tests at NASA’s Neutral Buoyancy Lab
- Design of safe avoidance control laws for ROVs equipped with new sensors
Theoretical foundations and validation of a hardware prototype for a multi-sensor navigation-aid system efficiently and economically provided collision avoidance for multiple robots deployed.
Magnetic Induction Remotely Operated Vehicles for Subsea Collision Avoidance
Aaron Becker
Dr. Aaron Becker's Robotic Swarm Control Lab at the University of Houston Cullen College of Engineering tests subsea ROV transmission and receiving technology at NASA's Neutral Buoyancy Lab. Research is supported by the Subsea Systems Institute at the University of Houston.
Remote Robotics for Unmanned Human Environments: SmartTouch Valkyrie Integration
Zheng Chen UH
The NASA R5, a.k.a., Valkyrie humanoid robot has brought about advances in robotic manipulation and supervisory control technologies.
Through its unique combination of sensor arrays, locomotive capabilities and dexterous manipulators, the Valkyrie possessed multiple functions and is designed to operate in harsh or degraded human-engineered environments. One such demonstrated function was the ability to interact with construction, such as scaffolding. While the ability to assemble human made structures is crucial to the humanitarian objectives of the Valkyrie or any other similar robots, equally important is the ability to accurately inspect and maintain existing infrastructures.
Due to the difficulty of using conventional inspection tools via remotely controlled robotic manipulators, there is no easy way to know for certain that the structural work performed by the robot is viable (e.g. bolt may not be tightened adequately at a key connection). Recently, researchers at the University of Houston have developed a non-invasive SmartTouch inspection tool designed for use by subsea ROVs/AUVs to easily inspect connections with a simple touch.
With further work, the SmartTouch technology can be adapted for use in robots such as the Valkyrie with far reaching advantages in their mission to benefit society.
Overall, the goal of the project was to integrate SmartTouch into the manipulators of the Valkyrie to enable one-touch inspection capabilities. The research encompassed the following tasks:
- Sensor Design
- Force Feedback Control
- Comprehensive Testing at UH
- Integration and Testing with a Valkyrie simulator at UH
SmartTouch Valkyrie Integration
Zheng Chen
The NASA R5, a.k.a., Valkyrie humanoid robot has brought about advances in robotic manipulation and supervisory control technologies. Through its unique combination of sensor arrays, locomotive capabilities and dexterous manipulators, the Valkyrie possessed multiple functions and is designed to operate in harsh or degraded human-engineered environments.
Hydrocarbon Influx Behavior within a Deepwater Marine Riser (AKA Gas-in-Riser Detection)
In 2017, SSI received funding from National Academies of Science to study the dynamic effects of free‐bubble gas formation within deepwater marine drilling risers – a major issue for the offshore industry and emphasized in the CSB Macondo report. Over the past three years, researchers have developed a computational model and validated it through a mechanical mechanism that not only detects gas-in-riser, but identifies the size of the gas bubble and the expansion rate of the gas bubble.
The project’s current focus is to find the best way to record the mechanical/pressure signal, develop the data analytics and intelligence methods to feed back into the numerical model and demonstrate efficacy of the system at identifying explosive gas bubbles.
*SSI is seeking industry collaboration to demonstrate the method through simulations and connections to model experiments to show the power of the method developed. Please contact us if you are interested in receiving more information and please see below for more details on upcoming scheduled presentations of this work at OTC and to the SPE Drilling Uncertainty Prediction Technical Section.
Hydrocarbon Influx Behavior within a Deepwater Marine Riser - Implications for Design and Operations
Subsea Systems Institute
In 2020, SSI issued a Request for Proposals for innovative research to positively impact safe and reliable exploration and energy production in the Gulf of Mexico that will lead to technology advancement consistent with the mission objectives of the SSI. Proposals were sought that would target early-stage research (TRL 1 through TRL 3) and address one of the challenges of life extension and decommissioning, offshore asset integrity monitoring or power electronics and power systems for offshore.
Please visit our website SUBSEASYSTEMS.INSTITUTE and/or contact SSI if you would like more information on any of the proposed upcoming work.
SSI received 16 proposals and selected six for funding (in no particular order):
Multi-Port Energy Router Using Intelligent Transformers (MERIT) to Interconnect Renewable Resources and Subsea Oil & Gas Factories via HVDC Link
Harish Krishnamoorthy UH | Kaushik Rajashekara UH
This project proposes a system of Multi-port Energy Routers using Intelligent Transformers (MERIT) to interface renewable resources and subsea O&G factories with the HVDC (or MVDC) Grid. In this project, we will investigate combining the energy from wind, wave, floating PV panels and fuel cell - based generators, all located near the subsea factories, to power the loads. Intelligent power converters, including solid state transformers (SSTs), are critical to enhance the power density, reliability and efficiency of the proposed MERIT system.
SSTs enable seamless interconnectivity and interoperability between the various energy sources. SSTs support features such as instantaneous voltage compensation, power outage compensation, fault isolation, bi-directional power flow, etc. This research will also determine optimal design and integration of SSTs into the MERIT system to have the best performance both during transient and steady state conditions. It is expected that widespread implementation of the proposed synergies can lead to over 50 % reduction of emissions in subsea O&G production activities.
The MERIT system is also envisioned to use fast circuit breaker technology including the possibility of connecting R-SFCL in series. This will increase the safety and reliability of the HVDC power transmission and distribution systems without expanding the size and capacity of the existing CBs. Another significance is that these techniques will improve the power quality and extend the lifetime of the expensive power converters, which will enable low maintenance and low risk to personnel in the future, once matured.
Developing Bio-Inspired Buoyancy Control for Subsea Service AUVs
Zheng Chen UH | Fathi Ghorbel RICE
The intellectual merit of this research stems from exploring how catalytic conversion based around fuel cells and water electrolysers could be used for liquid-gas transformation. Fuel cells and water electrolysers are envisioned to be reversible volume-mass plants housed inside UAVs. Controlling the reaction direction of electrolysis in fuel cells and water electrolysers would lead to a liquid-gas transformation, which would eventually enable fine distributed control of mass-volume of the AUV leading to a new paradigm of buoyancy control. Fine distributed buoyancy control, which is not feasible with current thruster/ballast mechanisms, will enable adaptive maneuvering and forceful interaction with the environment in confined spaces similar to how marine swimmers do.
A combination of the traditional thruster/ballast mechanism for gross buoyancy and motion, and the proposed soft robotics mechanism (fuel cells/water electrolysers) for fine and distributed buoyancy will undoubtedly provide AUV's with unprecedented capabilities. The broader impact of this research includes the opportunities created in exploring and expanding solid state fuel cell/electrolyzing technology as a soft robotics mechanism to address immediate exploration and production challenges in the Gulf of Mexico. The results of this research will be valuable not only to international deepwater oil and gas markets, but also to subsea renewable energies and subsea mining.
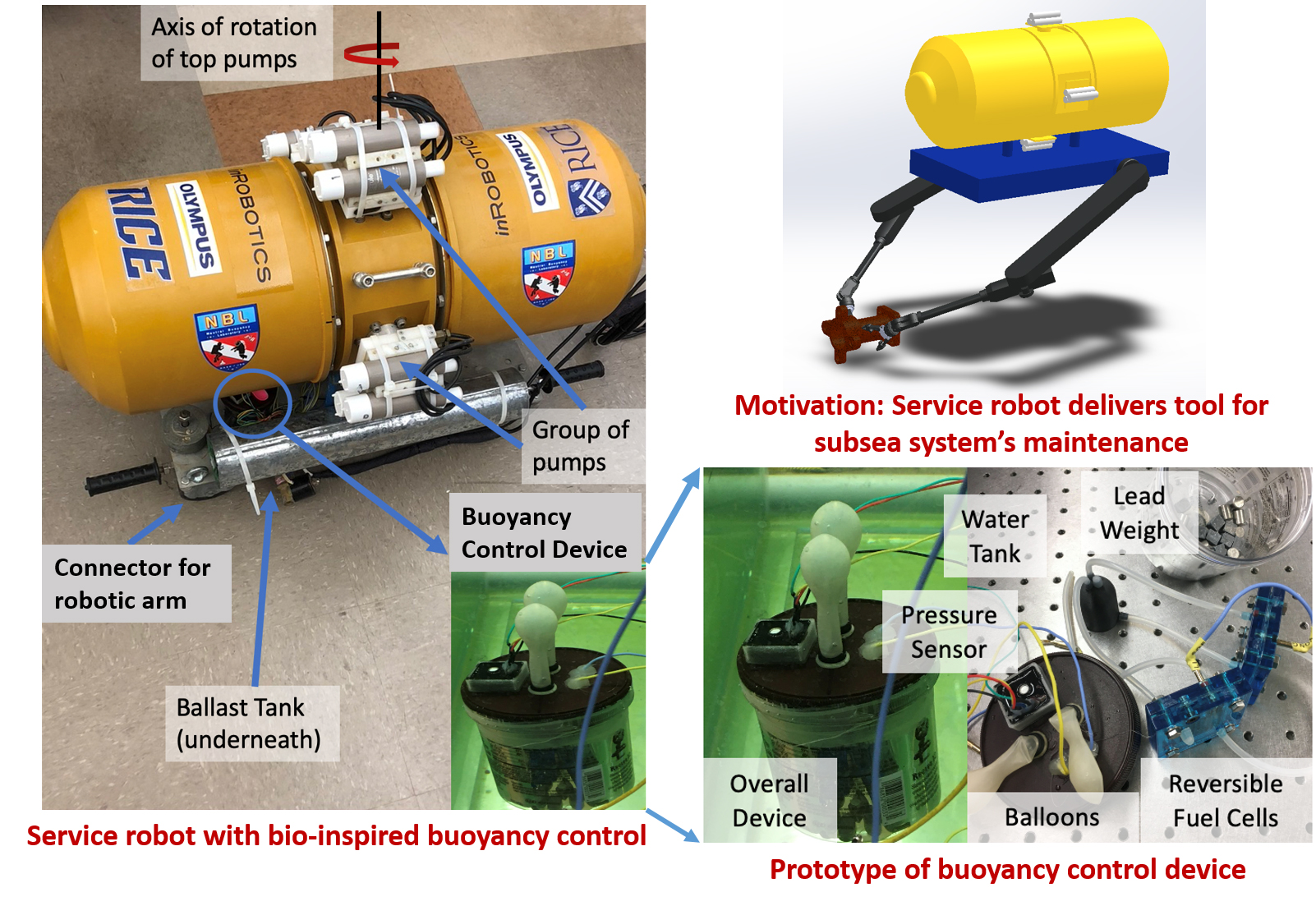 Inspired by how marine animals control buoyancy in both open sea and confined spaces, UH and Rice Researchers propose an underwater service robot.
Inspired by how marine animals control buoyancy in both open sea and confined spaces, UH and Rice Researchers propose an underwater service robot. Sensors Based on Organic Electrochemical Transistors (OECTs) for Deep Sea Leakage and Chemical Detection
Haleh Ardebili UH | Rafael Verduzco RICE
Pipeline networks are the most efficient method to transport oil, gas, and other liquids, but leaks are common and oftentimes go undetected. Leaks can result in billions of dollars of property damage, represent significant losses of revenue, and present significant safety challenges. To address this, we will develop miniaturized electronic sensors that can rapidly detect chemical signatures of leaks from pipelines. The devices will contain an array of thin film transistors (TFTs and organic electrochemical transistors (OECTs) capable of amperometric detection of target chemicals in the subsea environment. Each of these devices will be functionalized with molecularly imprinted polymers (MIPs) capable of molecular-level recognition and detection.
While OECTs and TFTs have been implemented in a variety of sensing applications, they have not been developed for leakage detection. By combining these two sensing architectures in a sensor array, we will build a sophisticated real-time sensor for chemical binding events that can be used to detect the presence of specific chemicals in the aqueous environment. The results of this work will demonstrate a proof-of-principle of versatile, low-cost sensors that can aid in the early detection for leak and spillage detection, and this work will pave the way for novel and improved chemical sensors for subsea applications, including the immediate detection of possible leakages or spills that can occur during subsea operations.
There will be a number of opportunities for future support and collaboration with industry. The proposed sensor architecture can be applied to sense chemicals in other environments (e.g. wastewater) and also for biomedical applications, such as the detection of harmful contaminants or pathogens.
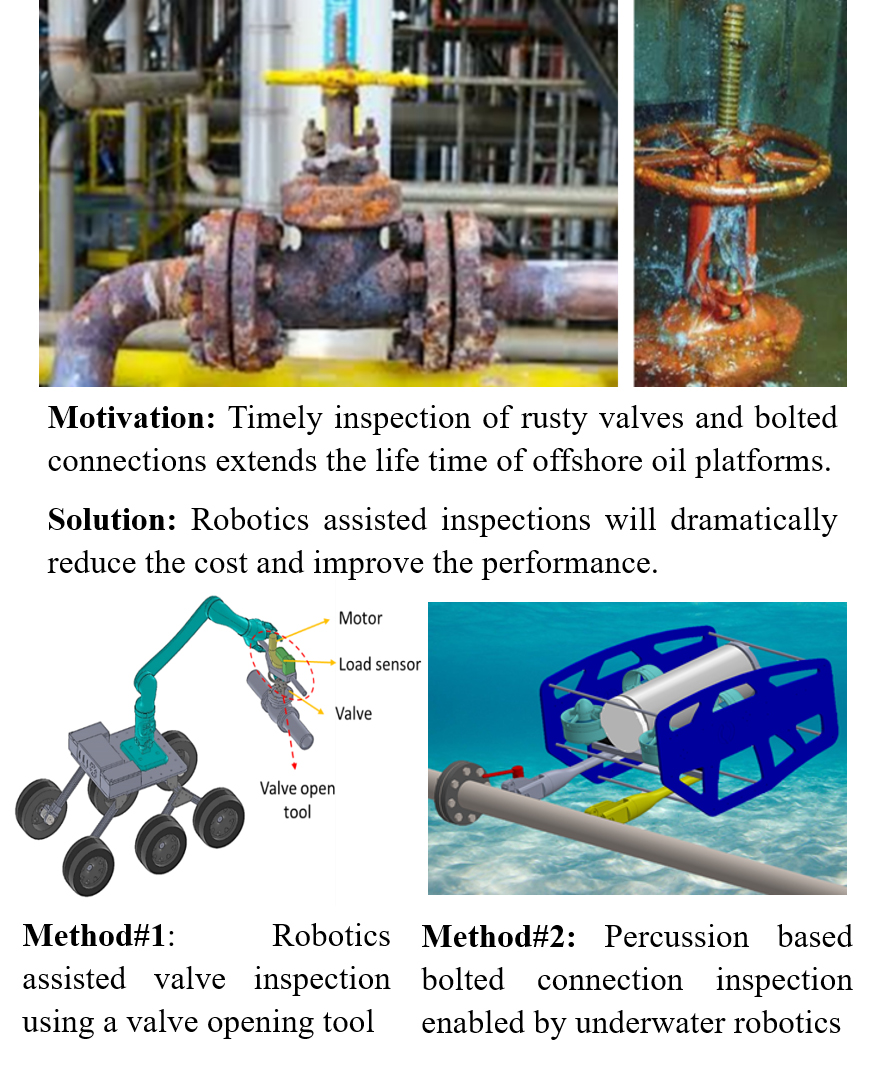
Asset Integrity of Valves and Bolted Connections
Zheng Chen UH | Gangbing Song UH
Offshore drilling activities over the last decades have left thousands of offshore oil platforms in bad condition and abandoned because of poor maintenance. To extend the lifetime of existing oil platforms that have been deployed for more than 20 years, timely inspection and maintenance of oil platform infrastructures are of great importance. Among those critical components in offshore oil production, 1) valves and 2) bolted connections are high priority to assess for failure.
One of the challenges in valve operation is the valve's failure caused by rust. Mild rust can cause the valve's rough operation. Excessive rust may lead to permanent structural damage and cause serious leakage. Preventing a valve's failure requires regular inspection and maintenance. Robotic enabled valve maintenance not only saves costs but also prevents workers from contacting the leaking valves.
The goal of this project is to develop transformative robotic valve inspection technology that will lead to a time efficient and cost-effective system for valve inspection and maintenance which can extend the life cycle of existing oil platforms. Through the proposed autonomous robotic system (i.e., autonomous ground service) equipped with valve operation and inspection tool, valve anomalies due to mechanical failures will be detected at early stages, which allows operators to make informed decisions on maintenance and repairs of abnormal valves.
Similarly, tapping and listening, also called percussion, is an intuitive way to detect structural abnormality, which has been used by us to invent a new approach to monitoring the looseness of bolted connection by using tapping and listening. The method of tapping and listening holds much potential in monitoring the looseness of subsea bolted connection due to its simplicity and suitability with robotics integration.
This project will develop robotics enabled percussion approach to subsea connection inspection. Since the Grayloc clamp connectors with the advantages of compact design are commonly used in oil and gas industry, in this research, both flange type and Grayloc connections under the submerged condition will be experimentally studied. Via a remote operated vehicle (ROV) that is equipped with a hydrophone, a visual-servoing system, and a percussion component, we can detect bolt looseness in subsea flanges and Grayloc connections.
This innovative method will translate to applications for inspection of other kinds of subsea structures. Ultimately, the project will push the boundaries of what can be accomplished by integrating robotics and structural health monitoring technologies.
High Accuracy Localization and Underwater Communication
Aaron Becker UH | Julien Leclerc UH | Miao Pan UH
This project will focus on magnetic induction 1) for high-accuracy, short range, non-optical localization for remotely operated underwater vehicles (ROV), and 2) in conjunction with acoustic modems to optimize communications between a maneuvering AUV and a sensor buoy.
Underwater vehicles need high-accuracy, short-range, non-optical localization. ROVs are relied on for subsea inspection, maintenance, and repair of structures where access by human personnel is dangerous. Work on subsea trees requires the ROV to accurately approach and manipulate controls. When the ROV needs to recharge or share high bandwidth information, it must dock with subsea structures. These types of maneuvers require precise localization, which is often performed using cameras and optical tracking. Collisions during these activities are dangerous for both the structure and the ROVs. Optical methods using lasers and/or a visual fiducial system have some limitations, especially in debris-filled or silt-laden water. Additionally, optical systems require a line-of-sight between the sensor and the target.
We have conducted preliminary studies on the use of triaxial magnetic induction (MI) coil antennas for localization at short distances between robots. At this range, MI antennas are affordable to produce and deploy (no moving parts), and have strong, high bandwidth signals that do not require line of sight. Their unique capabilities may be particularly suited for missions that require robots to dock with subsea structures.
These MI coils can sense the change in magnetic field distribution caused by metal structures, especially steel and other ferromagnetic materials. These coils can provide an additional sensing modality for structure identification and anti-collision with pipes and other subsea structures. Our proposal will explore this sensing modality.
Existing technologies currently deployed are acoustic localization and EM-based localization, which are commonly used for long range localization (meter to kilometers), but even the best accuracy of Long-baseline (LBL) systems is in the ±0.01 m range. Acoustic localization is limited by acoustic noise, and many operations (drilling, blowout) are acoustically noisy. Discussions with commercial advisors helped us outline some of the shortcomings of current EM based localization systems, including low range due to high attenuation and potential interference from metallic structures.
However, a hybrid method, relying on both MI and acoustic transmissions, would leverage the advantages of both technologies when performing underwater communications. Our focus are the interactions between AUVs and underwater sensor nodes. The AUV can utilize MI to communicate with nodes close to it, and acoustics to communicate with those further away. In cases where the environment considerably hinders acoustic communication with certain nodes, the AUV can also automatically switch to MI transmissions. This has the potential of speeding up data transfer with a sensor network and reducing mission time or providing increased robustness of data acquisition.
High-Energy and High-Power Quasi-Solid State Lithium Batteries for Subsea Applications
Pulickel Ajayan RICE | Babu Ganguli RICE
Materials and devices used in oil and gas (O&G) production and exploration experience extreme environmental conditions. With the continuous upsurge in demand for autonomous devices, there has been an increased need for energy storage systems that are high-energy and high-power that can operate under the most aggressive conditions. Li-ion batteries (LIBs) are at the forefront in this space. However, LIBs have long been limited to ambient temperatures and the internal electrochemical reactions while operating LIB’s has proven to cause thermal fluctuations that have led to battery explosions and safety issues. While past efforts to address these issues were focused on thermal management strategies, we have found that the performance and safety of LIBs at both low and high temperatures is inherently deep-rooted to their respective materials components, such as electrode and electrolyte materials, and the so-called solid-electrolyte interphases. In particular, there is no existing electrolyte chemistry that covers large temperature ranges, and devices are only stable and reliable at room temperature.
Our group has successfully demonstrated that the complete replacement of a conventional liquid electrolyte and the polymeric separator with a single quasi-solid composite electrolyte can extend the temperature range of supercapacitors to 200oC and of LIBs to 150oC. These quasi-solid composites constitute a new class of electrolytes and are formed by the combination of ceramic nanomaterials and high-boiling point organic solvents and room temperature ionic liquids (RTILs). Such an electrolyte system allows us to utilize high energy density metallic lithium as the anode without compromising on safety.
Also, the mechanical robustness of composite electrolyte allows us to build energy storage devices with different form factors, for instance, on-chip supercapacitor for IoT applications, miniaturized batteries for sensors, etc. This proposal will unveil the compatibility of quasi-solid-state electrolytes with high-capacity cathode materials such as LiNixCoyAlzO2 or LiNixCoyMnzO2 (with x + y + z = 1). Surface modification of these cathode particles and the interface stabilization for a wide range of temperatures will be the highest priority. Balancing quasi-solid lithium batteries for power and energy, validation of optimized battery for self-discharge, and studies over a wide range of temperatures (-20 to 120 °C) will be considered.
Though prior knowledge and reports are limited on formulating lithium battery configurations, we aim in this project to optimize and construct operable lithium batteries for targeted subsea applications. We will enhance electrode loading per unit area by preparing bulk composite electrodes in a layer-by-layer manner since it is one of the limiting factors for developing high energy density lithium batteries. The devices will also be tested under simulated field conditions, such as varying thermal ramp rates up to 120 °C, thermal cycling, and thermal shocks. Additionally, the shelf life of the batteries will be analyzed, which involves self-discharge under various conditions.
Please visit our website SUBSEASYSTEMS.INSTITUTE and/or contact SSI if you would like more information on any of the proposed upcoming work.
SSI Receives 7.95 Million Grant
By Jeannie Kever
SSI is pleased to announce it has received a $7.95 million grant funded by the RESTORE trust fund, funneled through the Texas Commission on Environmental Quality. The funds will be used for workforce training and economic development along the Gulf Coast, aimed at saving jobs and creating new jobs and training workers to use new technologies in offshore energy production.
“By moving to safer and more reliable offshore development, we can improve economic development opportunities along the Gulf Coast,” said Ramanan Krishnamoorti, director of the Subsea Systems Institute and chief energy officer at UH.
The job training programs will build, in part, on two micro-credentialing programs launched earlier this year by UH Energy, on sustainable energy development and the use of data analytics in the oil and gas industry. Other programs will be entirely new.
“All of this will be driven by our contacts in industry and the industry’s need for people with the skills that can drive economic development,” Krishnamoorti said. Robotics, for example, has been applied to a number of cutting-edge fields, from automated vehicles to outer space, but Krishnamoorti said its use has lagged in harsh offshore environments.
Expanding the use of automation and other technologies in offshore production would also provide new opportunities for start-up companies, Krishnamoorti said. Retraining current industry workers – already familiar with industry constraints – to use those technologies would improve safety and cut costs, in addition to safeguarding jobs, he said.
PEMSEC (Power Electronics, Energy Storage, Microgrids and Subsea Electrical Consortium)
PEMSEC is celebrating one year of progress. Officially formed January 1, 2020 with four members and one principal member, the consortium has focused on research in the area of subsea power distribution and protection, as well as electric heating of pipes to prevent hydrate formation, and predicting the reliability of electronic performance in subsea conditions.
This year, PEMSEC will work on grid integration of offshore renewable energy sources for powering the subsea electrical loads, on integrated superconducting fault current limiters (SFCL) based on modular dc breakers for future subsea grids, and on the effect of long cables on the subsea motor drives. Under continued guidance from the consortium members, additional topics will be identified to ensure relevance of the research to industry needs.
For more information, please visit: PEMSES.ECE.UH.EDU/PEMSEC
Meet SSI at These Upcoming Industry Events:
- April 13, 2021 Presentation of Gas-in-Riser work to SPE DUPTS
- August 16-19, 2021 OTC, Visit SSI researchers at the UH Energy booth and the R&D Showcase. Hear from SSI researchers on the Gas-in-Riser work at the Technical Session.
- THROUGHOUT 2021 SPRINT Robotics Webinars. SSI is a member of SPRINT Robotics and regularly attends and presents to the group.
Mindfulness and Safety in the Energy Industry
Read about University of Houston’s Ongoing Work Funded by National Academies of Science, Engineering and Medicine on Mindfulness and Safety in the Energy Industry: VISIT NASEM SITE